




Posicionador servo de dobre eixo tipo C/L/U
Parámetros técnicos
| Servoposicionador de dobre eixe tipo C | Posicionador servo de dobre eixo tipo L | Servoposicionador de dobre eixe tipo U | |||||||||||
| Número de serie | PROXECTOS | Parámetro | Parámetro | Parámetro | OBSERVACIÓNS | Parámetro | Parámetro | Parámetro | OBSERVACIÓNS | Parámetro | Parámetro | Parámetro | OBSERVACIÓNS |
| 1 | Carga nominal | 200 kg |
500 kg | 1000 kg | Dentro dun radio de R400 mm/R400 mm/R600 mm do segundo eixo | 500 kg | 1000 kg | 2000 kg | Dentro dun radio de R400 mm/R600 mm/R800 mm do segundo eixo | 1000 kg | 3000 kg | 5000 kg | Dentro dun radio de R600 mm/R1500 mm/R2000 mm do segundo eixo |
| 2 | Radio estándar de xiro | R400 mm | R400 mm | R600 mm |
| R400 mm | R600 mm | R800 mm |
| R600 mm | R1500 mm | R2000 mm |
|
| 3 | Ángulo de inversión do primeiro eixe | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | Ángulo de rotación do segundo eixe | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | Velocidade nominal de xiro ascendente do primeiro eixe | 50°/S | 50°/S | 15°/S |
| 50°/S | 50°/S | 17°/S |
| 17°/S | 17°/S | 17°/S |
|
| 6 | Velocidade de rotación nominal do segundo eixe | 70°/S | 70°/S | 70°/S |
| 70°/S | 70°/S | 17°/S |
| 24°/S | 17°/S | 24°/S |
|
| 7 | Precisión de posicionamento repetido | ±0,10 mm | ±0,15 mm | ±0,20 mm |
| ±0,10 mm | ±0,10 mm | 17°/S |
| ±0,15 mm | ±0,20 mm | ±0,25 mm |
|
| 8 | Dimensión límite do marco de desprazamento (lonxitude × anchura × altura) | 1200 mm × 600 mm × 70 mm | 1600 mm × 800 mm × 90 mm | 2000 mm × 1200 mm × 90 mm |
| - | - | - |
| - | - | - |
|
| 9 | Dimensión total do cambiador de posición (lonxitude × anchura × altura) | 2000 mm × 1100 mm × 1700 mm | 2300 mm × 1200 mm × 1900 mm | 2700 mm × 1500 mm × 2200 mm |
| 1500 mm × 500 mm × 850 mm | 2000 mm × 750 mm × 1200 mm | 2400 mm × 900 mm × 1600 mm |
| 4200 mm × 700 mm × 1800 mm | 5500 mm × 900 mm × 2200 mm | 6500 mm × 1200 mm × 2600 mm |
|
| 10 | Placa rotatoria estándar de dous eixes | - | - | - | - | Φ800 mm | Φ1200 mm | Φ1500 mm |
| Φ1500 mm | Φ1800 mm | Φ2000 mm |
|
| 11 | Altura central da rotación do primeiro eixe
| 1200 mm | 1350 mm | 1600 mm |
| 550 mm | 800 mm | 1000 mm |
| 1500 mm | 1750 mm | 2200 mm |
|
| 12 | Condicións da subministración de enerxía | Trifásico 200V±10%50Hz | Trifásico 200V±10%50Hz | Trifásico 200V±10%50Hz | Con transformador de illamento | Trifásico 200V±10%50Hz | Trifásico 200V±10%50Hz | Trifásico 200V±10%50Hz | Con transformador de illamento | Trifásico 200V±10%50Hz | Trifásico 200V±10%50Hz | Trifásico 200V±10%50Hz | Con transformador de illamento |
| 13 | Clase de illamento | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | Peso neto do equipo | Uns 800 kg | Uns 1300 kg | Uns 2000 kg |
| Uns 900 kg | Uns 1600 kg | Uns 2500 kg |
| Uns 2200 kg | Uns 4000 kg | Uns 6000 kg | |
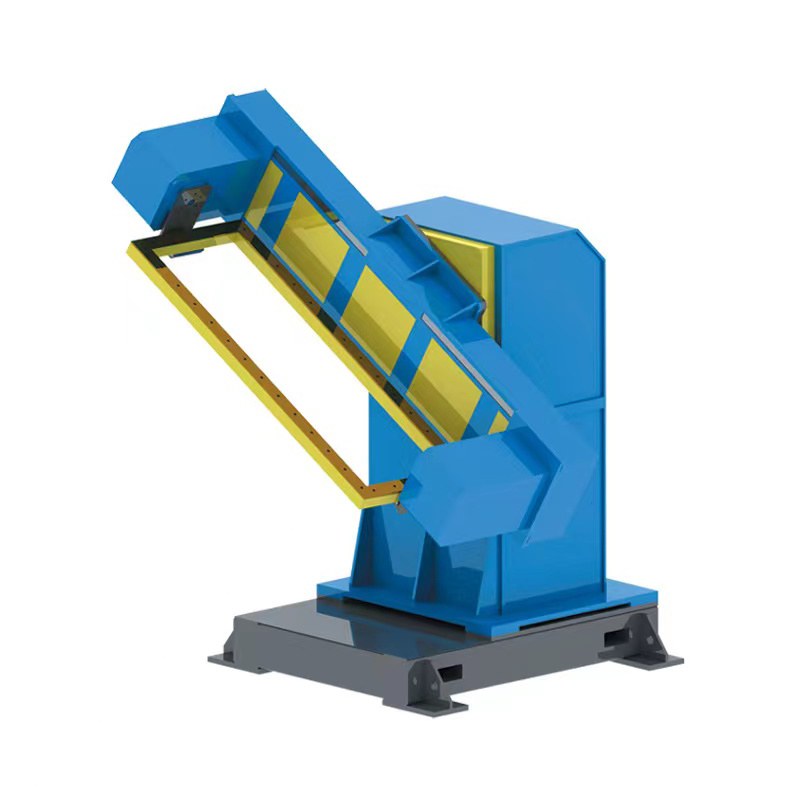
Servoposicionador de dobre eixe tipo C
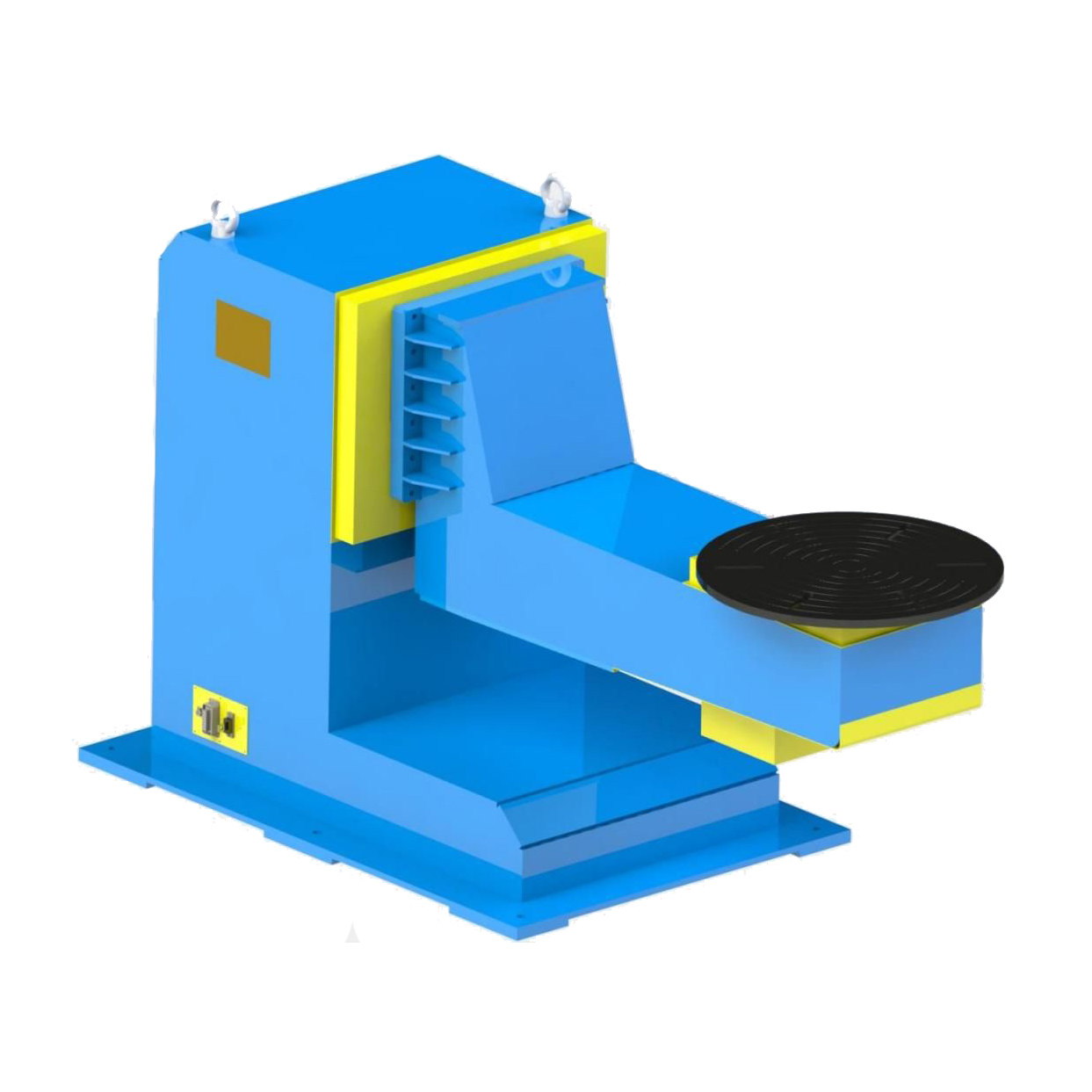
Posicionador servo de dobre eixo tipo L

Servoposicionador de dobre eixe tipo U
Introdución á estrutura
O posicionador servo de dobre eixe está composto principalmente por un marco integral soldado, un marco de desprazamento soldado, un servomotor de CA e un redutor de precisión RV, soporte rotatorio, mecanismo condutivo, escudo protector e sistema de control eléctrico. O marco integral soldado está soldado con perfís de alta calidade. Despois do recocido e alivio de tensións, debe procesarse mediante mecanizado profesional para garantir unha alta precisión do mecanizado e a exactitude das posicións clave. A superficie está pulverizada con pintura de aspecto antioxidante, que é fermosa e xenerosa, e a cor pódese personalizar segundo os requisitos do cliente.
A estrutura de desprazamento soldada estará soldada e moldeada con aceiro perfilado de alta calidade e procesada mediante mecanizado profesional. A superficie mecanizarase con orificios de parafuso estándar para a montaxe de ferramentas de posicionamento, e realizarase un tratamento de pintura, ennegrecemento e prevención da ferruxe.
A plataforma rotatoria selecciona aceiro de perfil de alta calidade despois dun procesamento mecánico profesional, e a superficie está mecanizada con orificios de parafuso estándar para a montaxe de ferramentas de posicionamento, e realízase un tratamento de ennegrecemento e prevención da ferruxe.
A selección dun servomotor de CA e dun redutor de RV como mecanismo de potencia pode garantir a estabilidade da rotación, a precisión do posicionamento, unha longa durabilidade e unha baixa taxa de fallo. O mecanismo condutivo está feito de latón, o que ten un bo efecto condutivo. A base condutiva adopta un illamento integral, que pode protexer eficazmente o servomotor, o robot e a fonte de alimentación da soldadura.
O sistema de control eléctrico adopta un PLC xaponés Omron para controlar o posicionador, cun rendemento estable e unha baixa taxa de fallos. Os compoñentes eléctricos son seleccionados de marcas coñecidas tanto nacionais como estranxeiras para garantir a calidade e a estabilidade de uso.











